
|
|
Schnelleinstieg CAN@home ist ein Konzept zur Anbindung der in der Haus-Automation anfallenden Hardware (Dimmer, Lampen, Rolläden, Steckdosen, Thermometer, Anzeigen, Taster, Schalter) an ein Bussystem. Das hier verwendete CAN-Bussystem läßt sich bequem per PC bedienen, konfigurieren und überwachen. Für den Betrieb ist ein laufender PC allerdings nicht erforderlich (alle Knoten gleichberechtigt, kein Master/Slave-Prinzip). Die Komponenten (CAN-Knoten) sind mittels verdrillter Zweidrahtleitung miteinander verbunden. Sie stellen die Verbindung der zu steuernden Hardware und dem CAN-Bus her. Die maximale Ausdehnung des CAN-Busses beträgt ca. 1km. Alle Buskoppler sind identisch aufgebaut. Die CAN-Knoten (=Buskoppler + Applikationshardware) unterscheiden sich lediglich in ihrer Software und der angebundenen Hardware (Applikationshardware). Ein Softwaregrundgerüst stellt die grundlegenden Funktionen für die Buskommunikation bereit.
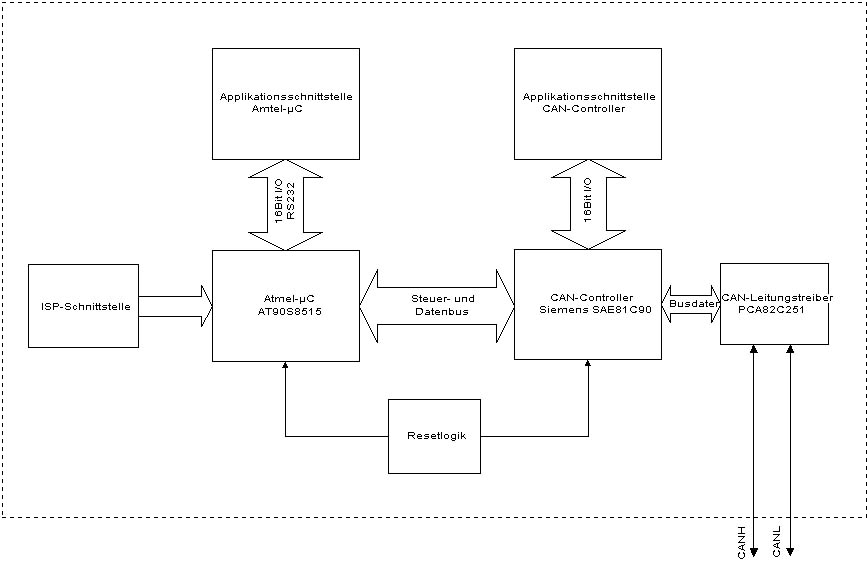
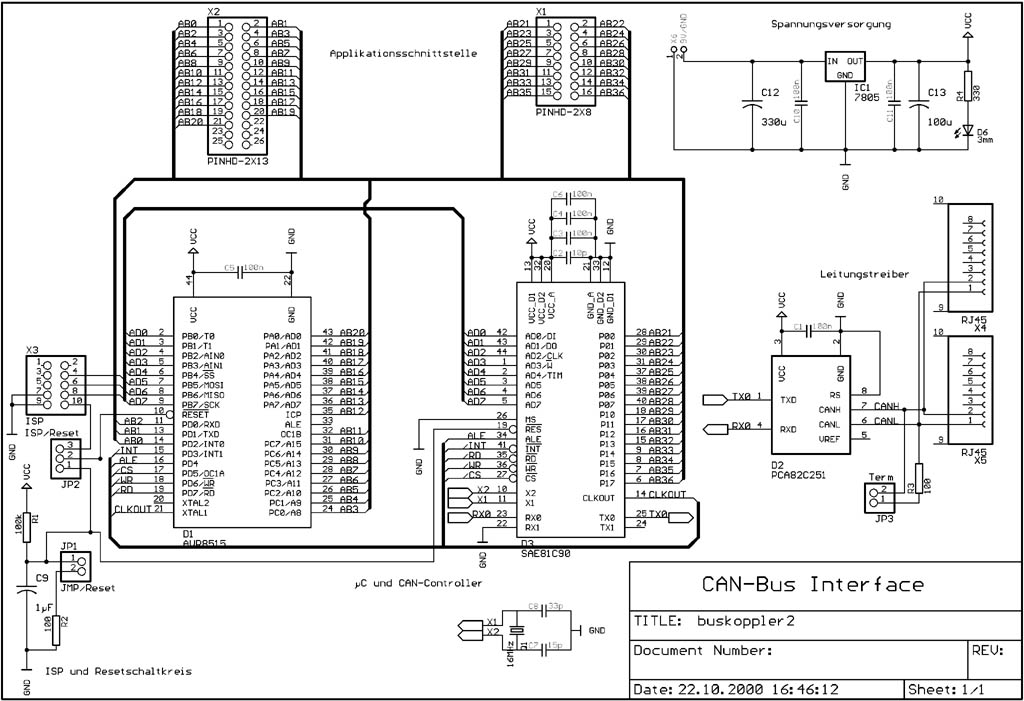
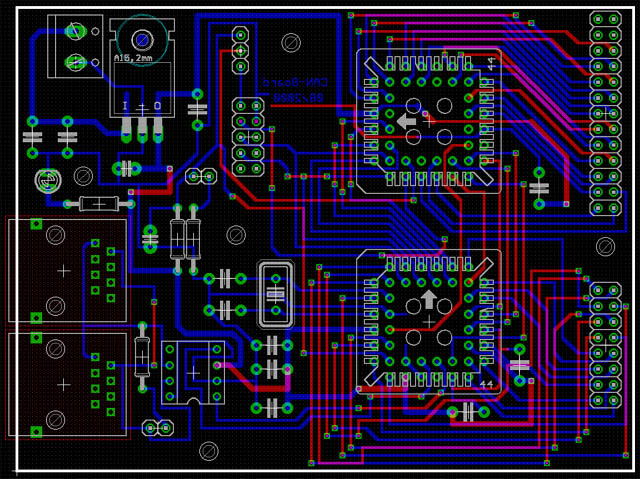
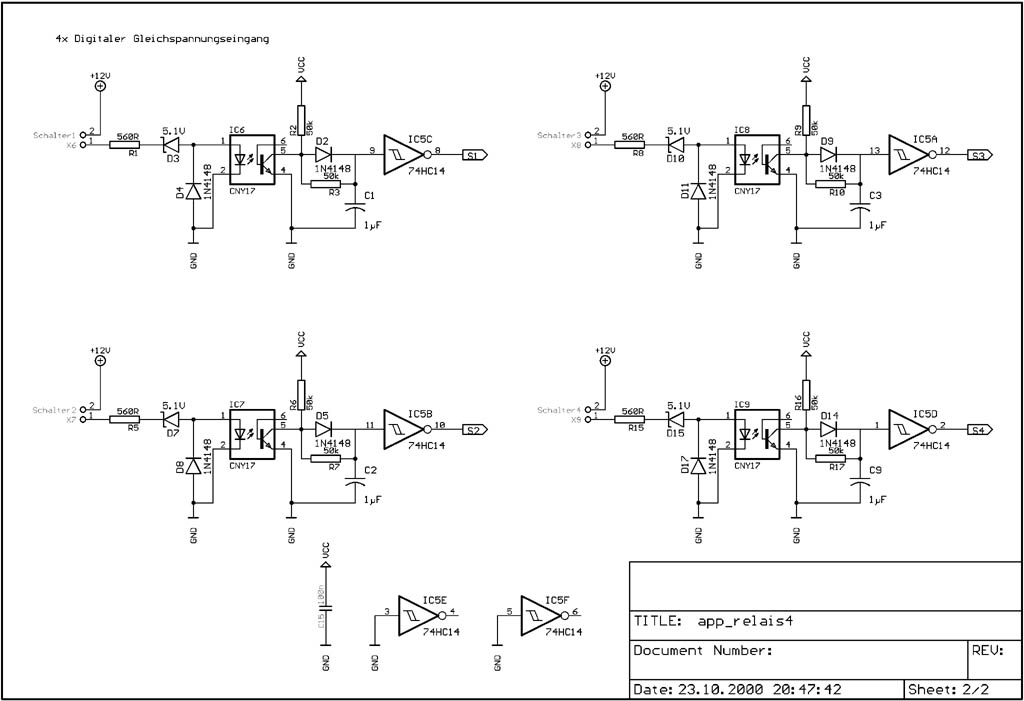
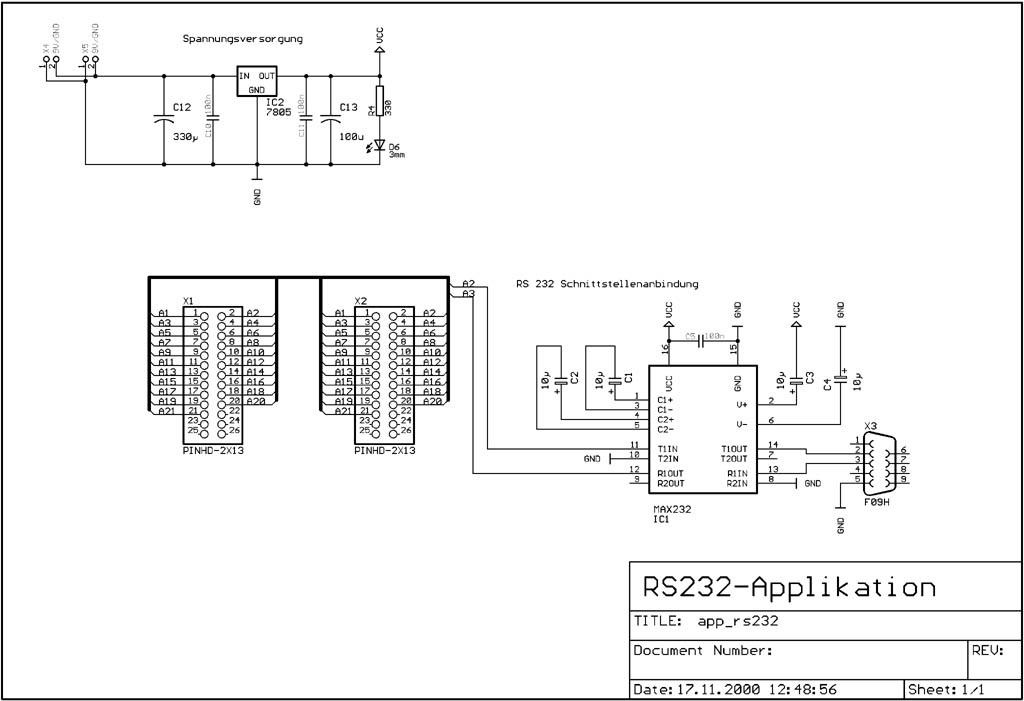
Hardware Der Buskoppler besteht aus einem Leitungstreiber (Philipps PCA82C251), der die TTL-Pegel des eingesetzten CAN-Controllers (Siemens/Infineon SAE81C90) an die CAN-spezifischen Signalpegel anpaßt. Der CAN-Controller wird von einem Atmel AVR AT90S8515 Mikrocontroller angesteuert. Drumrum noch die notwendige "glue logic", fertig. (Bild, Bild2, Bild SMD, Schema, Schaltplan, Layout). Eine neue Hardware (Hardware v2) benutzt den ATmega163. (Link) Applikationshardware (Interfacehardware zum direkten Anschluß an den Buskoppler):
Weiterführende und aktualisierte Informationen siehe Doku Kapitel 2. Hier werden auch neue Hardwareanbindungen vorgestellt.
Grundlegendes zum CAN-Bus kann im Abschnitt Doku (Kapitel
1.2) nachgelesen werden. Im Anschluß soll nur ein kurzer Einblick
in die Adressierung und Verteilung der CAN-IDs gegeben werden.
Ein Knotensoftwaregrundgerüst (Rahmensoftware) bildet den Rumpf jedes CAN-Knotens (codiert in C/AVRGCC). Es ist universell einsetzbar und für jeden Knotentyp identisch (egal ob DimmerKnoten oder RelaisKnoten oder ...). Es beeinhaltet die grundlegende Buskommunikation und nimmt die eintreffenden Pakete für die Applikationshardware/software entgegen. Durch die Rahmensoftware können Erweiterungen oder neue Projekte schnell umgesetzt werden. Das Hauptaugenmerk kann so auf die Neuerungen gelegt werden. Die Software im Buskoppler versteht u.a. die folgenden Befehle:
Damit lassen sich die Interna des Buskopplers von jedem anderen Knoten (bevorzugt vom PC zur Konfiguration via RS232-Knoten) steuern. Darüberhinaus kennt die RS232-Software noch einige Befehle, die die Kommunikation mit dem angebundenen PC regelt.
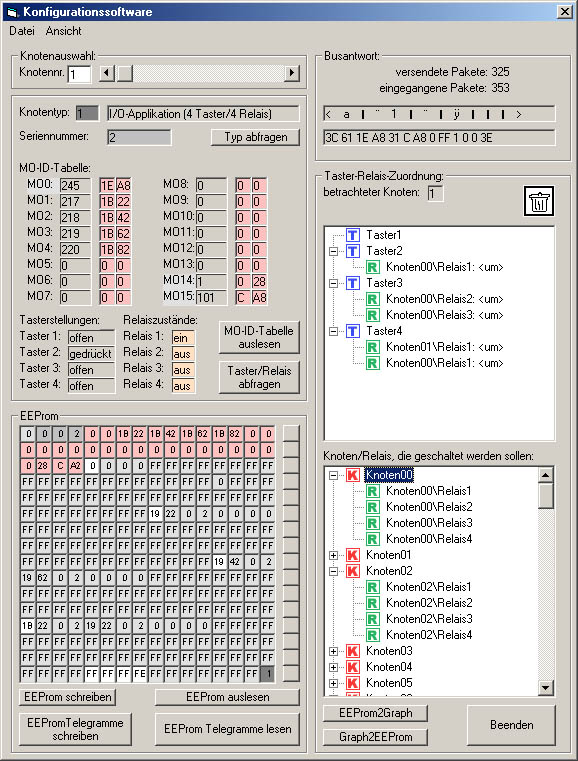
Für die Konfiguration der Taster/Relais-Zuordnung der IO-Applikation
(per Drag&Drop) dient die "alte" VisualBasic-Software (Screenshot).
Hier können die Interna (Speicherinhalte und Registerinhalte) dargestellt
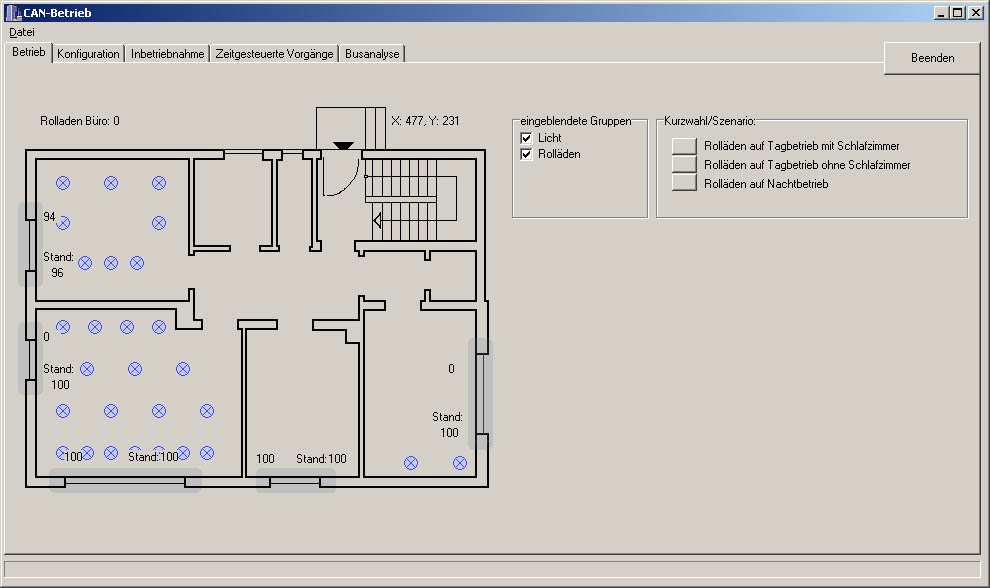
werden. Die neue, in C++ programmierte (Borland C++) Software wurde modularer und besser strukturiert aufgebaut. So stellt eine kleine Bibliothek die Grundfunktionen der CAN-Knoten bereit, während die GUI (Screenshot der Bediensoftware, hier speziell auf meine Bedürfnisse ausgerichtet) davon abgetrennt programmiert ist. Der Funktionsumfang entspricht inzwischen dem der VB-Software.
Die Dokumentation erklärt die CAN@home-spezifischen Grundlagen und zeigt den aktuellen Stand des Projekts. Die Doku ist sozusagen das Zentrum von CAN@home. Hier fließen die Hauptneuerungen ein; wichtige Punkte werden zusätzlich in der Rubrik "News" bekanntgegeben. Bei Problemen oder Fragen: email. |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}